Note
Go to the end to download the full example code.
Optical flow methods convergence#
In this example we test the convergence of the optical flow methods available in pysteps using idealized motion fields.
To test the convergence, using an example precipitation field we will:
Read precipitation field from a file
Morph the precipitation field using a given motion field (linear or rotor) to generate a sequence of moving precipitation patterns.
Using the available optical flow methods, retrieve the motion field from the precipitation time sequence (synthetic precipitation observations).
Let’s first load the libraries that we will use.
from datetime import datetime
import time
import matplotlib.pyplot as plt
import numpy as np
from matplotlib.pyplot import get_cmap
from scipy.ndimage import uniform_filter
import pysteps as stp
from pysteps import motion, io, rcparams
from pysteps.motion.vet import morph
from pysteps.visualization import plot_precip_field, quiver
Load the reference precipitation data#
First, we will import a radar composite from the archive. You need the pysteps-data archive downloaded and the pystepsrc file configured with the data_source paths pointing to data folders.
# Selected case
date = datetime.strptime("201505151630", "%Y%m%d%H%M")
data_source = rcparams.data_sources["mch"]
Load the data from the archive#
root_path = data_source["root_path"]
path_fmt = data_source["path_fmt"]
fn_pattern = data_source["fn_pattern"]
fn_ext = data_source["fn_ext"]
importer_name = data_source["importer"]
importer_kwargs = data_source["importer_kwargs"]
# Find the reference field in the archive
fns = io.archive.find_by_date(
date, root_path, path_fmt, fn_pattern, fn_ext, timestep=5, num_prev_files=0
)
# Read the reference radar composite
importer = io.get_method(importer_name, "importer")
reference_field, quality, metadata = io.read_timeseries(
fns, importer, **importer_kwargs
)
del quality # Not used
reference_field = np.squeeze(reference_field) # Remove time dimension
Preprocess the data#
# Convert to mm/h
reference_field, metadata = stp.utils.to_rainrate(reference_field, metadata)
# Mask invalid values
reference_field = np.ma.masked_invalid(reference_field)
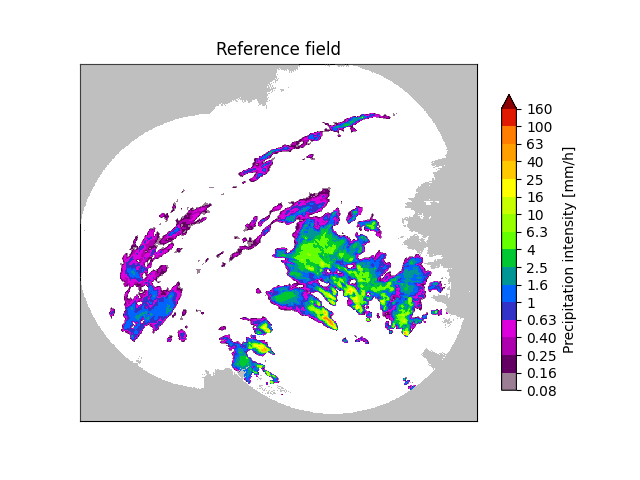
# Plot the reference precipitation
plot_precip_field(reference_field, title="Reference field")
plt.show()
# Log-transform the data [dBR]
reference_field, metadata = stp.utils.dB_transform(
reference_field, metadata, threshold=0.1, zerovalue=-15.0
)
print("Precip. pattern shape: " + str(reference_field.shape))
# This suppress nan conversion warnings in plot functions
reference_field.data[reference_field.mask] = np.nan
Precip. pattern shape: (640, 710)
Synthetic precipitation observations#
Now we need to create a series of precipitation fields by applying the ideal motion field to the reference precipitation field “n” times.
To evaluate the accuracy of the computed_motion vectors, we will use a relative RMSE measure. Relative MSE = <(expected_motion - computed_motion)^2> / <expected_motion^2>
# Relative RMSE = Rel_RMSE = sqrt(Relative MSE)
#
# - Rel_RMSE = 0%: no error
# - Rel_RMSE = 100%: The retrieved motion field has an average error equal in
# magnitude to the motion field.
#
# Relative RMSE is computed over a region surrounding the precipitation
# field, were there is enough information to retrieve the motion field.
# The "precipitation region" includes the precipitation pattern plus a margin of
# approximately 20 grid points.
Let’s create a function to construct different motion fields.
def create_motion_field(input_precip, motion_type):
"""
Create idealized motion fields to be applied to the reference image.
Parameters
----------
input_precip: numpy array (lat, lon)
motion_type: str
The supported motion fields are:
- linear_x: (u=2, v=0)
- linear_y: (u=0, v=2)
- rotor: rotor field
Returns
-------
ideal_motion : numpy array (u, v)
"""
# Create an imaginary grid on the image and create a motion field to be
# applied to the image.
ny, nx = input_precip.shape
x_pos = np.arange(nx)
y_pos = np.arange(ny)
x, y = np.meshgrid(x_pos, y_pos, indexing="ij")
ideal_motion = np.zeros((2, nx, ny))
if motion_type == "linear_x":
ideal_motion[0, :] = 2 # Motion along x
elif motion_type == "linear_y":
ideal_motion[1, :] = 2 # Motion along y
elif motion_type == "rotor":
x_mean = x.mean()
y_mean = y.mean()
norm = np.sqrt(x * x + y * y)
mask = norm != 0
ideal_motion[0, mask] = 2 * (y - y_mean)[mask] / norm[mask]
ideal_motion[1, mask] = -2 * (x - x_mean)[mask] / norm[mask]
else:
raise ValueError("motion_type not supported.")
# We need to swap the axes because the optical flow methods expect
# (lat, lon) or (y,x) indexing convention.
ideal_motion = ideal_motion.swapaxes(1, 2)
return ideal_motion
Let’s create another function that construct the temporal series of precipitation observations.
def create_observations(input_precip, motion_type, num_times=9):
"""
Create synthetic precipitation observations by displacing the input field
using an ideal motion field.
Parameters
----------
input_precip: numpy array (lat, lon)
Input precipitation field.
motion_type: str
The supported motion fields are:
- linear_x: (u=2, v=0)
- linear_y: (u=0, v=2)
- rotor: rotor field
num_times: int, optional
Length of the observations sequence.
Returns
-------
synthetic_observations: numpy array
Sequence of observations
"""
ideal_motion = create_motion_field(input_precip, motion_type)
# The morph function expects (lon, lat) or (x, y) dimensions.
# Hence, we need to swap the lat,lon axes.
# NOTE: The motion field passed to the morph function can't have any NaNs.
# Otherwise, it can result in a segmentation fault.
morphed_field, mask = morph(
input_precip.swapaxes(0, 1), ideal_motion.swapaxes(1, 2)
)
mask = np.array(mask, dtype=bool)
synthetic_observations = np.ma.MaskedArray(morphed_field, mask=mask)
synthetic_observations = synthetic_observations[np.newaxis, :]
for t in range(1, num_times):
morphed_field, mask = morph(
synthetic_observations[t - 1], ideal_motion.swapaxes(1, 2)
)
mask = np.array(mask, dtype=bool)
morphed_field = np.ma.MaskedArray(
morphed_field[np.newaxis, :], mask=mask[np.newaxis, :]
)
synthetic_observations = np.ma.concatenate(
[synthetic_observations, morphed_field], axis=0
)
# Swap back to (lat, lon)
synthetic_observations = synthetic_observations.swapaxes(1, 2)
synthetic_observations = np.ma.masked_invalid(synthetic_observations)
synthetic_observations.data[np.ma.getmaskarray(synthetic_observations)] = 0
return ideal_motion, synthetic_observations
def plot_optflow_method_convergence(input_precip, optflow_method_name, motion_type):
"""
Test the convergence to the actual solution of the optical flow method used.
Parameters
----------
input_precip: numpy array (lat, lon)
Input precipitation field.
optflow_method_name: str
Optical flow method name
motion_type: str
The supported motion fields are:
- linear_x: (u=2, v=0)
- linear_y: (u=0, v=2)
- rotor: rotor field
"""
if optflow_method_name.lower() != "darts":
num_times = 2
else:
num_times = 9
ideal_motion, precip_obs = create_observations(
input_precip, motion_type, num_times=num_times
)
oflow_method = motion.get_method(optflow_method_name)
elapsed_time = time.perf_counter()
computed_motion = oflow_method(precip_obs, verbose=False)
print(
f"{optflow_method_name} computation time: "
f"{(time.perf_counter() - elapsed_time):.1f} [s]"
)
precip_obs, _ = stp.utils.dB_transform(precip_obs, inverse=True)
precip_data = precip_obs.max(axis=0)
precip_data.data[precip_data.mask] = 0
precip_mask = (uniform_filter(precip_data, size=20) > 0.1) & ~precip_obs.mask.any(
axis=0
)
cmap = get_cmap("jet").copy()
cmap.set_under("grey", alpha=0.25)
cmap.set_over("none")
# Compare retrieved motion field with the ideal one
plt.figure(figsize=(9, 4))
plt.subplot(1, 2, 1)
ax = plot_precip_field(precip_obs[0], title="Reference motion")
quiver(ideal_motion, step=25, ax=ax)
plt.subplot(1, 2, 2)
ax = plot_precip_field(precip_obs[0], title="Retrieved motion")
quiver(computed_motion, step=25, ax=ax)
# To evaluate the accuracy of the computed_motion vectors, we will use
# a relative RMSE measure.
# Relative MSE = < (expected_motion - computed_motion)^2 > / <expected_motion^2 >
# Relative RMSE = sqrt(Relative MSE)
mse = ((ideal_motion - computed_motion)[:, precip_mask] ** 2).mean()
rel_mse = mse / (ideal_motion[:, precip_mask] ** 2).mean()
plt.suptitle(
f"{optflow_method_name} " f"Relative RMSE: {np.sqrt(rel_mse) * 100:.2f}%"
)
plt.show()
Lucas-Kanade#
Constant motion x-direction#
plot_optflow_method_convergence(reference_field, "LucasKanade", "linear_x")
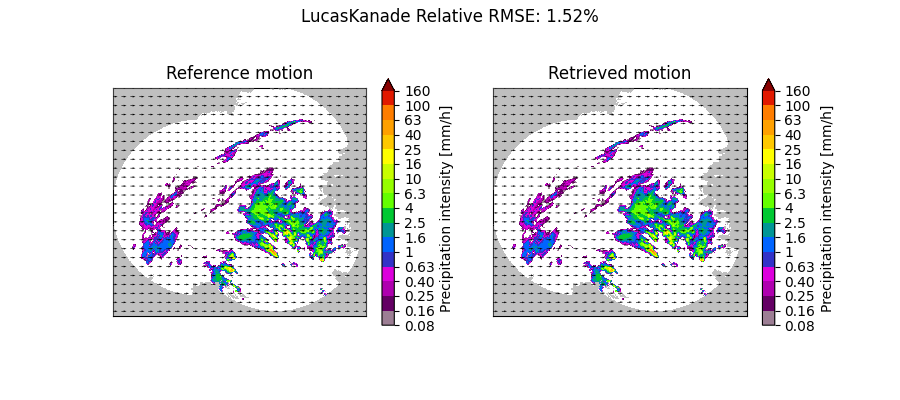
LucasKanade computation time: 1.0 [s]
Constant motion y-direction#
plot_optflow_method_convergence(reference_field, "LucasKanade", "linear_y")
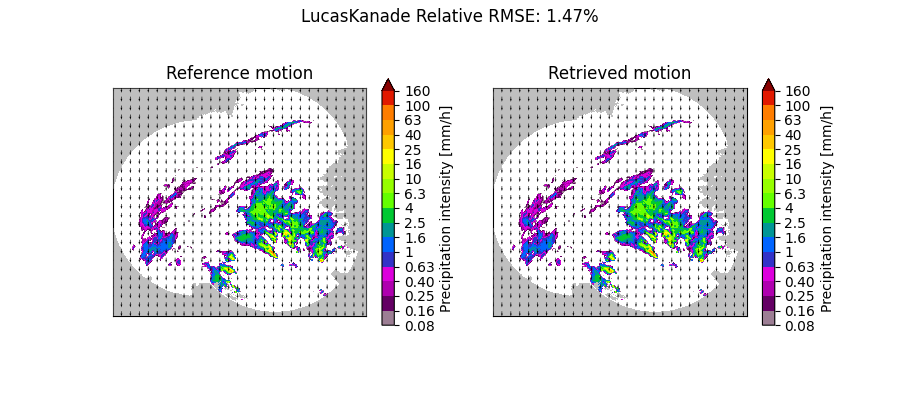
LucasKanade computation time: 1.0 [s]
Rotational motion#
plot_optflow_method_convergence(reference_field, "LucasKanade", "rotor")
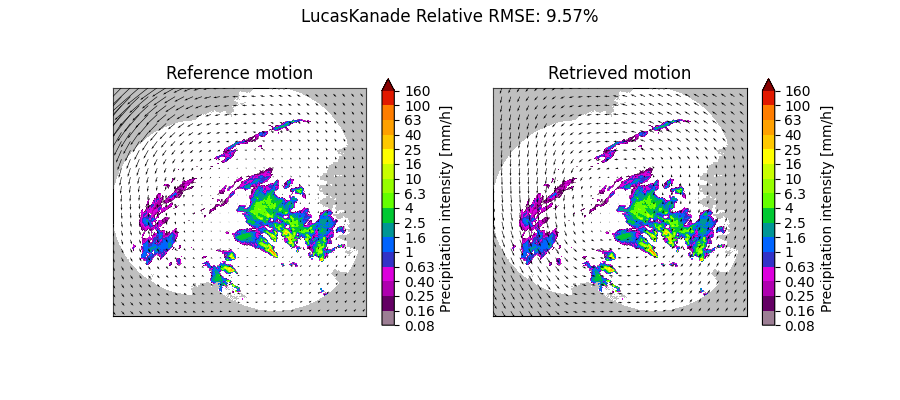
LucasKanade computation time: 1.0 [s]
Variational Echo Tracking (VET)#
Constant motion x-direction#
plot_optflow_method_convergence(reference_field, "VET", "linear_x")
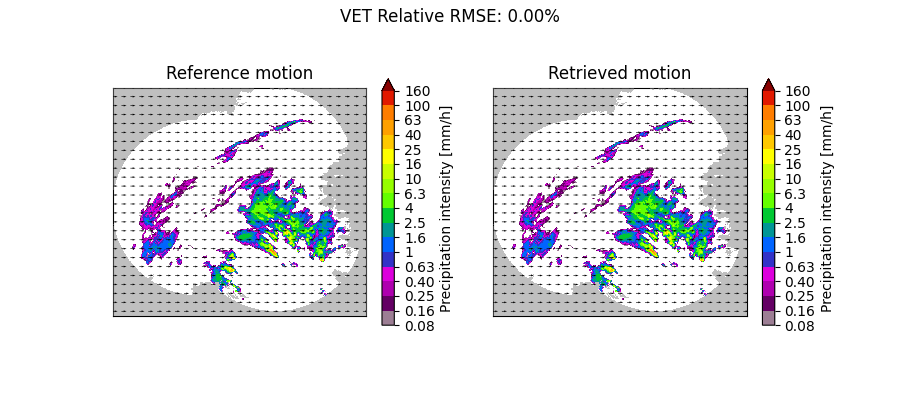
VET computation time: 2.0 [s]
Constant motion y-direction#
plot_optflow_method_convergence(reference_field, "VET", "linear_y")
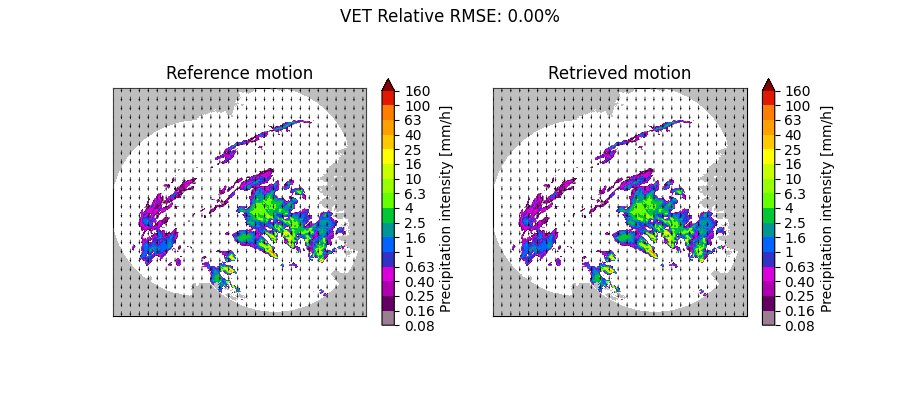
VET computation time: 1.9 [s]
Rotational motion#
plot_optflow_method_convergence(reference_field, "VET", "rotor")
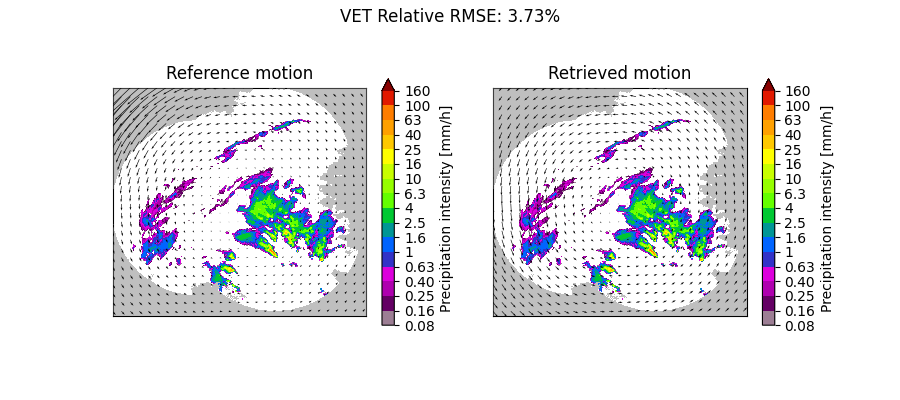
VET computation time: 13.8 [s]
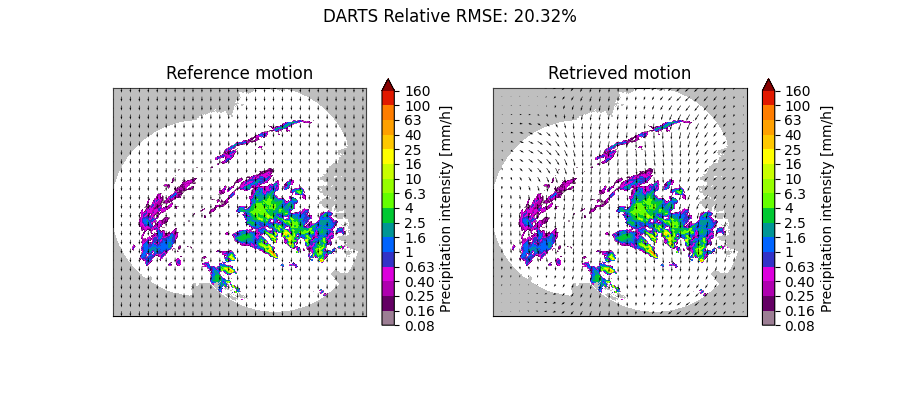
DARTS#
Constant motion x-direction#
plot_optflow_method_convergence(reference_field, "DARTS", "linear_x")
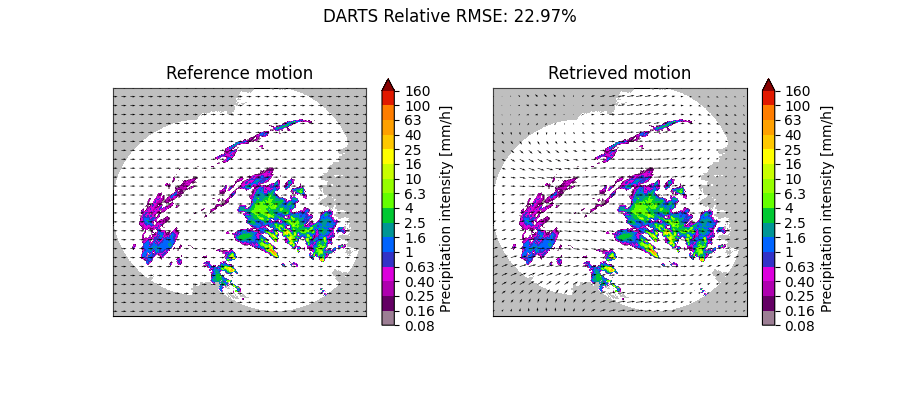
DARTS computation time: 1.2 [s]
Constant motion y-direction#
plot_optflow_method_convergence(reference_field, "DARTS", "linear_y")
DARTS computation time: 1.2 [s]
Rotational motion#
plot_optflow_method_convergence(reference_field, "DARTS", "rotor")
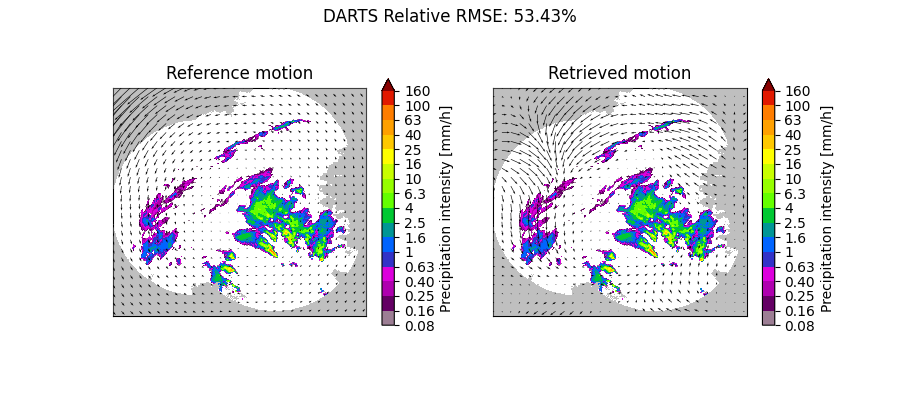
DARTS computation time: 1.2 [s]
Farneback#
Constant motion x-direction#
plot_optflow_method_convergence(reference_field, "farneback", "linear_x")
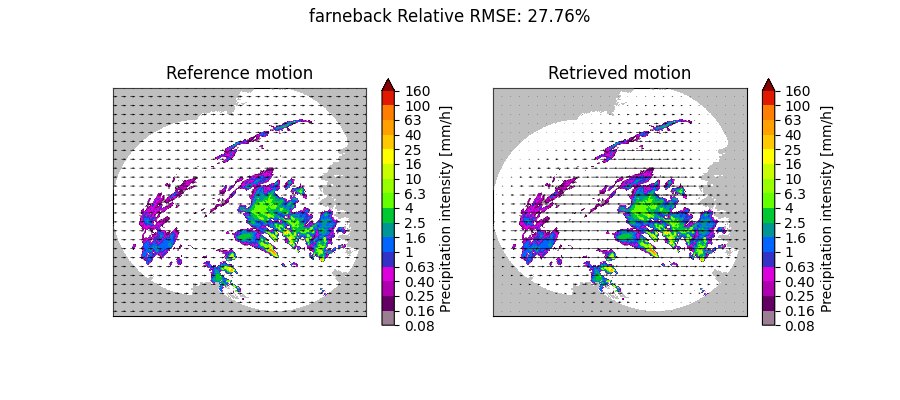
farneback computation time: 0.4 [s]
Constant motion y-direction#
plot_optflow_method_convergence(reference_field, "farneback", "linear_y")
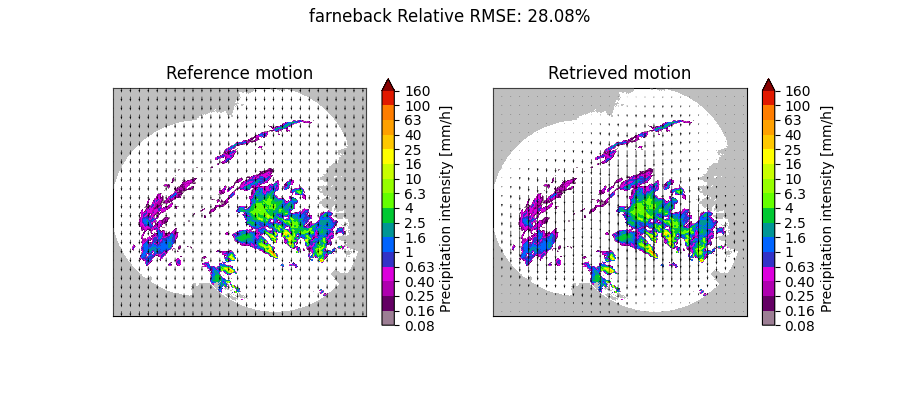
farneback computation time: 0.4 [s]
Rotational motion#
plot_optflow_method_convergence(reference_field, "farneback", "rotor")
# sphinx_gallery_thumbnail_number = 5
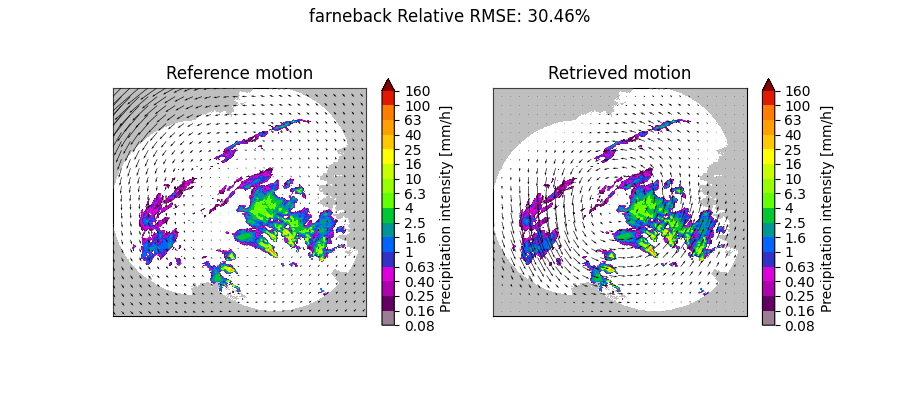
farneback computation time: 0.4 [s]
Total running time of the script: (0 minutes 29.016 seconds)