Note
Click here to download the full example code
Handling of no-data in Lucas-Kanade¶
Areas of missing data in radar images are typically caused by visibility limits such as beam blockage and the radar coverage itself. These artifacts can mislead the echo tracking algorithms. For instance, precipitation leaving the domain might be erroneously detected as having nearly stationary velocity.
This example shows how the Lucas-Kanade algorithm can be tuned to avoid the erroneous interpretation of velocities near the maximum range of the radars by buffering the no-data mask in the radar image in order to exclude all vectors detected nearby no-data areas.
from datetime import datetime
from matplotlib import cm, colors
import matplotlib.pyplot as plt
import numpy as np
from pysteps import io, motion, nowcasts, rcparams, verification
from pysteps.utils import conversion, transformation
from pysteps.visualization import plot_precip_field, quiver
Read the radar input images¶
First, we will import the sequence of radar composites. You need the pysteps-data archive downloaded and the pystepsrc file configured with the data_source paths pointing to data folders.
# Selected case
date = datetime.strptime("201607112100", "%Y%m%d%H%M")
data_source = rcparams.data_sources["mch"]
Load the data from the archive¶
root_path = data_source["root_path"]
path_fmt = data_source["path_fmt"]
fn_pattern = data_source["fn_pattern"]
fn_ext = data_source["fn_ext"]
importer_name = data_source["importer"]
importer_kwargs = data_source["importer_kwargs"]
timestep = data_source["timestep"]
# Find the two input files from the archive
fns = io.archive.find_by_date(
date, root_path, path_fmt, fn_pattern, fn_ext, timestep=5, num_prev_files=1
)
# Read the radar composites
importer = io.get_method(importer_name, "importer")
R, quality, metadata = io.read_timeseries(fns, importer, **importer_kwargs)
del quality # Not used
Out:
/home/docs/checkouts/readthedocs.org/user_builds/pysteps/envs/v1.2.0/lib/python3.8/site-packages/pysteps/io/importers.py:752: RuntimeWarning: invalid value encountered in greater
if np.any(precip > np.nanmin(precip)):
/home/docs/checkouts/readthedocs.org/user_builds/pysteps/envs/v1.2.0/lib/python3.8/site-packages/pysteps/io/importers.py:753: RuntimeWarning: invalid value encountered in greater
metadata["threshold"] = np.nanmin(precip[precip > np.nanmin(precip)])
Preprocess the data¶
# Convert to mm/h
R, metadata = conversion.to_rainrate(R, metadata)
# Keep the reference frame in mm/h and its mask (for plotting purposes)
ref_mm = R[0, :, :].copy()
mask = np.ones(ref_mm.shape)
mask[~np.isnan(ref_mm)] = np.nan
# Log-transform the data [dBR]
R, metadata = transformation.dB_transform(
R, metadata, threshold=0.1, zerovalue=-15.0
)
# Keep the reference frame in dBR (for plotting purposes)
ref_dbr = R[0].copy()
ref_dbr[ref_dbr < -10] = np.nan
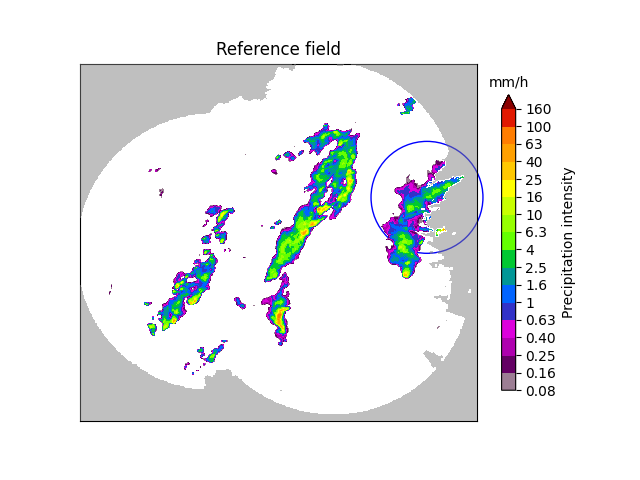
# Plot the reference field
plot_precip_field(ref_mm, title="Reference field")
circle = plt.Circle((620, 400), 100, color="b", clip_on=False, fill=False)
plt.gca().add_artist(circle)
plt.show()
Out:
/home/docs/checkouts/readthedocs.org/user_builds/pysteps/envs/v1.2.0/lib/python3.8/site-packages/pysteps/utils/transformation.py:210: RuntimeWarning: invalid value encountered in less
zeros = R < threshold
/home/docs/checkouts/readthedocs.org/user_builds/pysteps/checkouts/v1.2.0/examples/LK_buffer_mask.py:81: RuntimeWarning: invalid value encountered in less
ref_dbr[ref_dbr < -10] = np.nan
/home/docs/checkouts/readthedocs.org/user_builds/pysteps/envs/v1.2.0/lib/python3.8/site-packages/pysteps/visualization/precipfields.py:271: RuntimeWarning: invalid value encountered in less
R[R < 0.1] = np.nan
Notice the “half-in, half-out” precipitation area within the blue circle. As we are going to show next, the tracking algorithm can erroneously interpret precipitation leaving the domain as stationary motion.
Also note that the radar image includes NaNs in areas of missing data. These are used by the optical flow algorithm to define the radar mask.
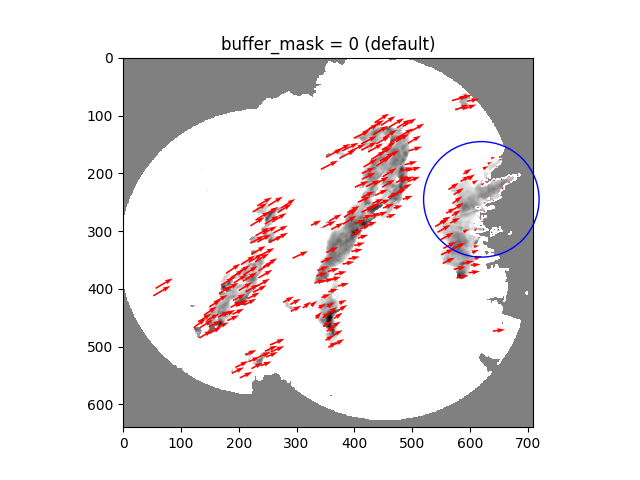
Sparse Lucas-Kanade¶
By setting the optional argument ‘dense=False’ in ‘xy, uv = LK_optflow(…..)’, the LK algorithm returns the motion vectors detected by the Lucas-Kanade scheme without interpolating them on the grid. This allows us to better identify the presence of wrongly detected stationary motion in areas where precipitation is leaving the domain (look for the red dots within the blue circle in the figure below).
# get Lucas-Kanade optical flow method
LK_optflow = motion.get_method("LK")
# Mask invalid values
R = np.ma.masked_invalid(R)
R.data[R.mask] = np.nan
# Use default settings (i.e., no buffering of the radar mask)
fd_kwargs1 = {"buffer_mask":0}
xy, uv = LK_optflow(R, dense=False, fd_kwargs=fd_kwargs1)
plt.imshow(ref_dbr, cmap=plt.get_cmap("Greys"))
plt.imshow(mask, cmap=colors.ListedColormap(["black"]), alpha=0.5)
plt.quiver(
xy[:, 0],
xy[:, 1],
uv[:, 0],
uv[:, 1],
color="red",
angles="xy",
scale_units="xy",
scale=0.2,
)
circle = plt.Circle((620, 245), 100, color="b", clip_on=False, fill=False)
plt.gca().add_artist(circle)
plt.title("buffer_mask = 0 (default)")
plt.show()
Out:
/home/docs/checkouts/readthedocs.org/user_builds/pysteps/envs/v1.2.0/lib/python3.8/site-packages/pysteps/utils/images.py:212: RuntimeWarning: invalid value encountered in greater
field_bin = np.ndarray.astype(input_image > thr, "uint8")
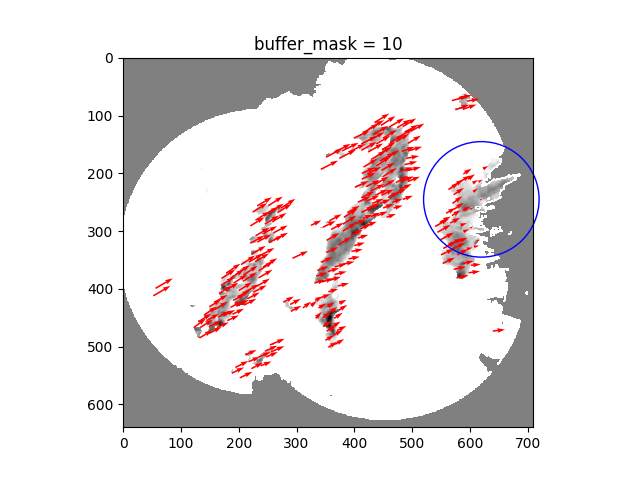
By default, the LK algorithm considers missing values as no precipitation, i.e., no-data are the same as no-echoes. As a result, the fixed boundaries produced by precipitation in contact with no-data areas are interpreted as stationary motion. One way to mitigate this effect of the boundaries is to introduce a slight buffer of the no-data mask so that the algorithm will ignore all the portions of the radar domain that are nearby no-data areas. This is achieved by passing the keyword argument ‘buffer_mask = 10’ within the feature detection optional arguments ‘fd_kwargs’.
# with buffer
buffer = 10
fd_kwargs2 = {"buffer_mask":buffer}
xy, uv = LK_optflow(R, dense=False, fd_kwargs=fd_kwargs2)
plt.imshow(ref_dbr, cmap=plt.get_cmap("Greys"))
plt.imshow(mask, cmap=colors.ListedColormap(["black"]), alpha=0.5)
plt.quiver(
xy[:, 0],
xy[:, 1],
uv[:, 0],
uv[:, 1],
color="red",
angles="xy",
scale_units="xy",
scale=0.2,
)
circle = plt.Circle((620, 245), 100, color="b", clip_on=False, fill=False)
plt.gca().add_artist(circle)
plt.title("buffer_mask = %i" % buffer)
plt.show()
Dense Lucas-Kanade¶
The above displacement vectors produced by the Lucas-Kanade method are now interpolated to produce a full field of motion (i.e., ‘dense=True’). By comparing the velocity of the motion fields, we can easily notice the negative bias that is introduced by the the erroneous interpretation of velocities near the maximum range of the radars.
UV1 = LK_optflow(R, dense=True, fd_kwargs=fd_kwargs1)
UV2 = LK_optflow(R, dense=True, fd_kwargs=fd_kwargs2)
V1 = np.sqrt(UV1[0] ** 2 + UV1[1] ** 2)
V2 = np.sqrt(UV2[0] ** 2 + UV2[1] ** 2)
plt.imshow((V1 - V2) / V2, cmap=cm.RdBu_r, vmin=-0.5, vmax=0.5)
plt.colorbar(fraction=0.04, pad=0.04)
plt.title("Relative difference in motion speed")
plt.show()
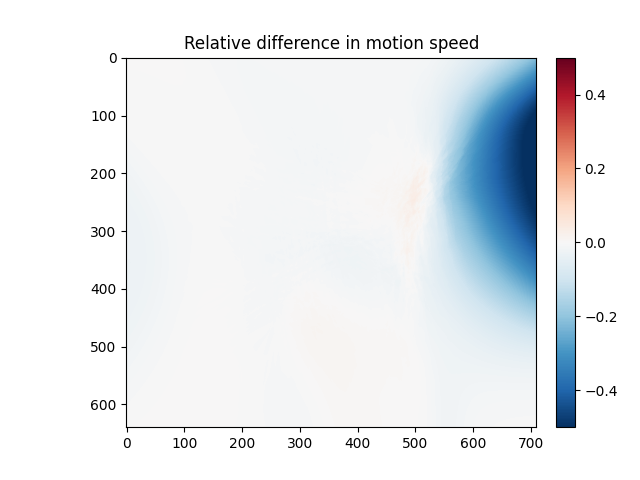
Notice that the default motion field can be significantly slower (more than 10% slower) because of the presence of wrong stationary motion vectors at the edges.
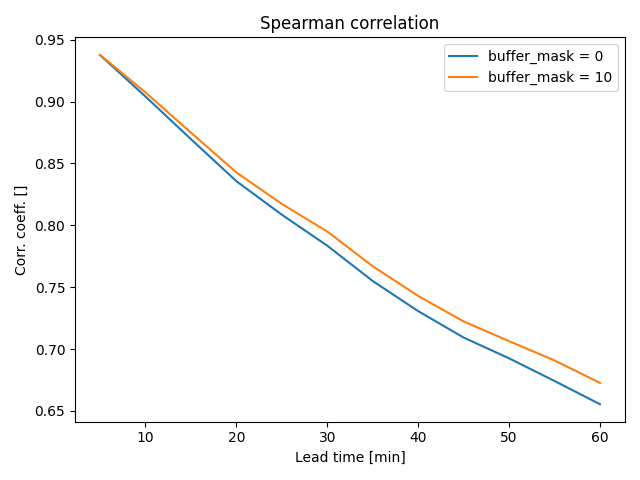
Forecast skill¶
We are now going to evaluate the benefit of buffering the radar mask by computing the forecast skill in terms of the Spearman correlation coefficient. The extrapolation forecasts are computed using the dense UV motion fields estimted above.
# Get the advection routine and extrapolate the last radar frame by 12 time steps
# (i.e., 1 hour lead time)
extrapolate = nowcasts.get_method("extrapolation")
R[~np.isfinite(R)] = metadata["zerovalue"]
R_f1 = extrapolate(R[-1], UV1, 12)
R_f2 = extrapolate(R[-1], UV2, 12)
# Back-transform to rain rate
R_f1 = transformation.dB_transform(R_f1, threshold=-10.0, inverse=True)[0]
R_f2 = transformation.dB_transform(R_f2, threshold=-10.0, inverse=True)[0]
# Find the veriyfing observations in the archive
fns = io.archive.find_by_date(
date,
root_path,
path_fmt,
fn_pattern,
fn_ext,
timestep=5,
num_next_files=12,
)
# Read and convert the radar composites
R_o, _, metadata_o = io.read_timeseries(fns, importer, **importer_kwargs)
R_o, metadata_o = conversion.to_rainrate(R_o, metadata_o)
# Compute Spearman correlation
skill = verification.get_method("corr_s")
score_1 = []
score_2 = []
for i in range(12):
score_1.append(skill(R_f1[i, :, :], R_o[i + 1, :, :])["corr_s"])
score_2.append(skill(R_f2[i, :, :], R_o[i + 1, :, :])["corr_s"])
x = (np.arange(12) + 1) * 5 # [min]
plt.plot(x, score_1, label="buffer_mask = 0")
plt.plot(x, score_2, label="buffer_mask = %i" % buffer)
plt.legend()
plt.xlabel("Lead time [min]")
plt.ylabel("Corr. coeff. []")
plt.title("Spearman correlation")
plt.tight_layout()
plt.show()
Out:
/home/docs/checkouts/readthedocs.org/user_builds/pysteps/envs/v1.2.0/lib/python3.8/site-packages/pysteps/utils/transformation.py:240: RuntimeWarning: invalid value encountered in less
R[R < threshold] = zerovalue
As expected, the corrected motion field produces better forecast skill already within the first hour into the nowcast.
# sphinx_gallery_thumbnail_number = 2
Total running time of the script: ( 0 minutes 17.237 seconds)